Ich bin der glückliche Besitzer einer Sharp XL-560 Mini-Stereoanlage, die ich vor einiger Zeit relativ günstig über ebay-Kleinanzeigen bekommen habe. Ein schönes Gerät, besonders die Tatsache das es einen Drehknopf hat, mit dem man die Lautstärke einstellen kann ist super. Mein Radio vorher hatte nur zwei Knöpfe, das war ein bisschen nervig, wenn es plötzlich zu laut war 🙂
Das Gerät ist schon aus einer bisschen älteren Generation, und hat die für die Zeit übliche Kombination: (UKW-)Radio, CD, Kassette, AUX-Eingang. Nun, irgendwie war meine Anwendung für das Kassettedeck ein bisschen limitiert (ich weiß bis heute nicht, ob es überhaupt funktioniert…). Daher nun also meine Idee: Modernisieren wir das Ding ein bisschen, und ersetzen das Kassettendeck durch einen Rasperry Pi Zero, mit Internetradio und Airplay. Gesagt getan 🙂 In diesem Post schreibe ich ein bisschen war zum Hardware-Umbau, zur Software kommt später noch mal was.
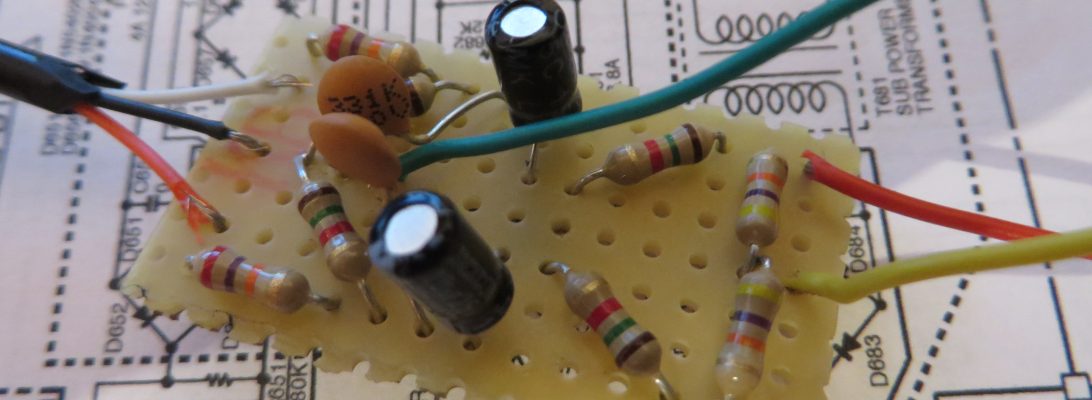
Eine weitere schöne Eigenschaft dieses Radios ist, das man im Internet ein Service-Manual findet, komplett mit Demontageintruktionen, Fehlersuchhilfe, Blockschaltbild und vollständigem Schaltplan (!) inklusive Bestückungsplan (!!). Ganz ehrlich, ohne dieses Dokument hätte ich das auch nicht hinbekommen… Zeit, mal wieder den Schreibtisch ins Chaos zu stürzen 🙂
Weiterlesen →