
Vor inzwischen doch schon einiger Zeit hatte ich bei einem Besuch der Hannover ein Modell aus fischertechnik gesehen, was dort mit einer SPS gesteuert wurde. Irgendwie hat das mein Interesse an fischertechnik wieder geweckt (nachdem ich sie ja vor einiger Zeit schon mal wieder rausgekramt hatte). Geplant war ein Hochregallager, ein scheinbar ziemlich beliebtes Modell.
Nach ein wenig Gebastel war dann auch eine erste Version fertig (mit tatkräftiger Unterstützung ;)), die im Grunde auch funktionierte. Aber ich wollte mehr 👿 Äh naja, ich wollte jedenfalls gerne noch eine Version bauen, bei der sich der Hauptarm drehen konnte, und ich wollte auch gerne einen Greifer der sich öffnen und schließen konnte, statt nur von unten unter die Objekte zu fahren und sie anzuheben (ich habe leider keine Fotos von der alten Version gemacht). Da zu der Zeit Knobloch, der Einzelteilhändler gerade einen Abverkauf hatte, habe ich mich dort noch mal mit Teilen eingedeckt, speziell den Teilen für einen Greifer.
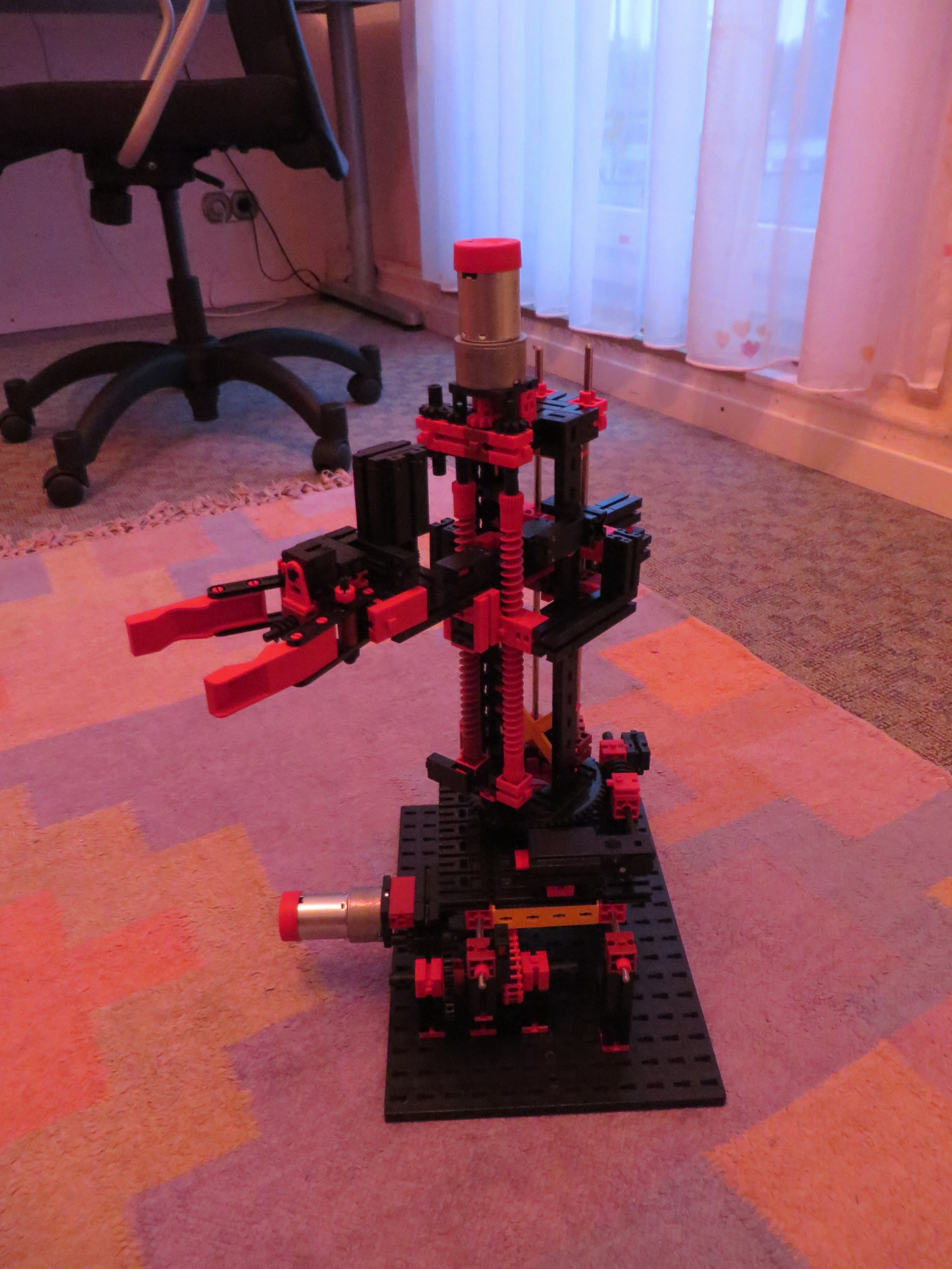 Nun entstand diese Version des Turms, die über 5 Achsen verfügt (Schiene unten, Drehen, Hochachse, Greifer vor/zurück, Greifer auf/zu).
Nun entstand diese Version des Turms, die über 5 Achsen verfügt (Schiene unten, Drehen, Hochachse, Greifer vor/zurück, Greifer auf/zu).
Das ganze Modell soll natürlich auch vom Computer gesteuert werden. Da meine fischertechnik-Sammlung schon ein wenig älter ist, habe ich das Robo Interface, das inzwischen ja auch schon von zwei neueren Generationen überholt ist. Leider haben alle Computer-Interfaces ein kleines Problem: Sie können maximal vier Motoren steuern, zumindest, wenn sie sich in beide Richtungen drehen können sollen. Mein Roboter hat aber 5 Achsen 🙁
Die offizielle Lösung ist eine Robo I/O Extension, ein kleiner Kasten der mit dem Interface verbunden wird, und noch mal 4 Motorausgänge und 8 Tastereingänge bereitstellt. Davon kann man sogar drei verketten und hat dann schon eine ziemliche Menge an Ausgängen. Leider sind die Dinger relativ teuer (~90€) und aktuell auch nicht mehr erhältlich, nur gelegentlich taucht mal ein gebrauchtes zu ziemlich heftigen Preisen bei eBay auf. Aber man bastelt ja gerne an Elektronik rum, also warum nicht einfach eins selber bauen? So schwer sollte das eigentlich nicht sein, das Protokoll hat jemand mal entschlüsselt (leider nur noch über archive.org). Die sogenannten „Bundhülsen“, welche die Stecker aufnehmen und sich auf Platinen löten lassen, sind im Netz erhältlich. Außerdem ermöglicht ein Eigenbau natürlich auch immer ein paar einzigartige Features (ein bisschen EEPROM zum Beispiel).
Ich werde ein den folgenden Artikeln mehr über mein selbst gebautes Erweiterungsmodul schreiben. Aktuell ist es noch nicht komplett fertig, aber auf einem guten Weg. Das ganze Projekt nenne ich intern mal „ftRoboExt“.
3 Gedanken zu „fischertechnik Hochregallager und eine Robo Extension im Eigenbau“