
…und am Anfang war der Entwurf. Ein eigenes Erweiterungsmodul für das Robo Interface soll es also werden. (Siehe hier für mehr Infos)
Grundlage sollte natürlich ein AVR sein, weil ich die am Besten kenne, und man dann auch immer gleich die Arduino Bibliotheken mitbenutzen kann 😉 Das Protokoll ist im Wesentlichen ein SPI Bus mit einer speziellen Bestätigungsleitung, das sollte sich also auch problemlos umsetzen lassen. Da die Schnittstelle mit 3,3V betrieben wird sollte auch das gesamte Modul mit dieser Spannung laufen. Die Motoren müssen aber natürlich mit 9V betrieben werden, so dass ein Spannungsregler nötig ist. Für die Motoren sind auch Treiber nötig, da habe ich den TLE4207 eingesetzt, mit dem anderen schon gute Erfahrungen gemacht haben.
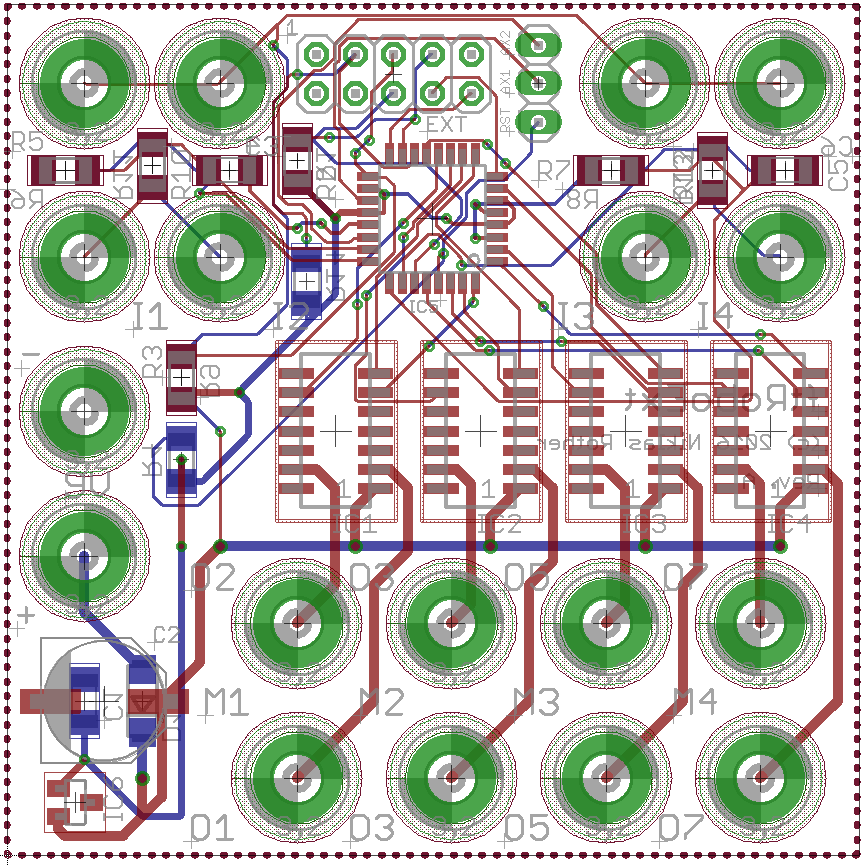 Die nächste spannende Frage: In was für ein Gehäuse soll das Modul eingebaut werden? Ein Gehäuse wollte ich auf jeden Fall haben, einfach damit sich das ganze gut im Modell unterbringen lässt. Nach ein wenig Suche bin ich auf die Kassetten gestoßen, die gerade dazu einladen, Dinge dort hineinzubauen. Mit 60x60mm Grundfläche ist dort aber natürlich nicht viel Platz drin, die originalen Module haben etwa die doppelte Fläche. Nach ein wenig Überlegung kam ich dann zu dem Schluss, das gesamte Modul in SMD-Technik zu bauen, auf diese Weise kann ich die Platine zweiseitig bestücken; anders ist es kaum möglich, alles in der kleinen Box unter zu bringen.
Die nächste spannende Frage: In was für ein Gehäuse soll das Modul eingebaut werden? Ein Gehäuse wollte ich auf jeden Fall haben, einfach damit sich das ganze gut im Modell unterbringen lässt. Nach ein wenig Suche bin ich auf die Kassetten gestoßen, die gerade dazu einladen, Dinge dort hineinzubauen. Mit 60x60mm Grundfläche ist dort aber natürlich nicht viel Platz drin, die originalen Module haben etwa die doppelte Fläche. Nach ein wenig Überlegung kam ich dann zu dem Schluss, das gesamte Modul in SMD-Technik zu bauen, auf diese Weise kann ich die Platine zweiseitig bestücken; anders ist es kaum möglich, alles in der kleinen Box unter zu bringen.