
Nachdem Hardware und Software mehr oder weniger fertig sind, kam jetzt das Gehäuse an die Reihe. Der Plan stand ja schon seit der anfänglichen Planung: Das Modul sollte in eine 60er Kassette. Die Kassette stand auch schon seit dem Baubeginn hier bereit, jetzt mussten noch die Löcher in den Deckel 🙂
Dabei gab es zwei Probleme: Zum einen ist der Deckel aus Acrylglas, bei dem ich mir nicht ganz sicher war, wie gut man das bohren kann, zum anderen sind die Bundhülsen nicht ganz gerade eingelötet, so dass sich nicht wirklich ein Raster ergibt, sondern alle Löscher ein bisschen versetzt sind. Um das Problem zu lösen habe ich einfach den Deckel auf die Hülsen gelegt und dann angezeichnet, aber es war doch recht schwierig, die Markierungen auf dem Glas zu sehen, zum die Bohrmaschine leider nicht gerade an der bestbeleuchteten Ecke unserer Werkstatt steht…
Das Bohren selber war viel einfacher als gedacht. Wichtig ist nur, sehr langsam vorzugehen, und nicht zu stark zu drücken, ansonsten reißt das Glas, was mir auch ein paar Mal passiert ist. Zum Glück sind es aber nur kleine Stellen. Ich hatte befürchtet, dass die Löcher nach unten ausfransen würden, und daher das Glas von oben gebohrt. Das war insofern unpraktisch, als ich das Glas so nicht komplett auf die Unterlage auflegen konnte, weil der Deckel ja noch kleine Ecken zum festklemmen hat. Dadurch, dass der Deckel ein bisschen in der Luft hin, wurde das Problem mit dem Reißen vermutlich noch deutlich verstärkt. Ausgefranst sind die Löcher überhaupt nicht, ich hätte also auch von unten bohren können. Wieder was gelernt 😉
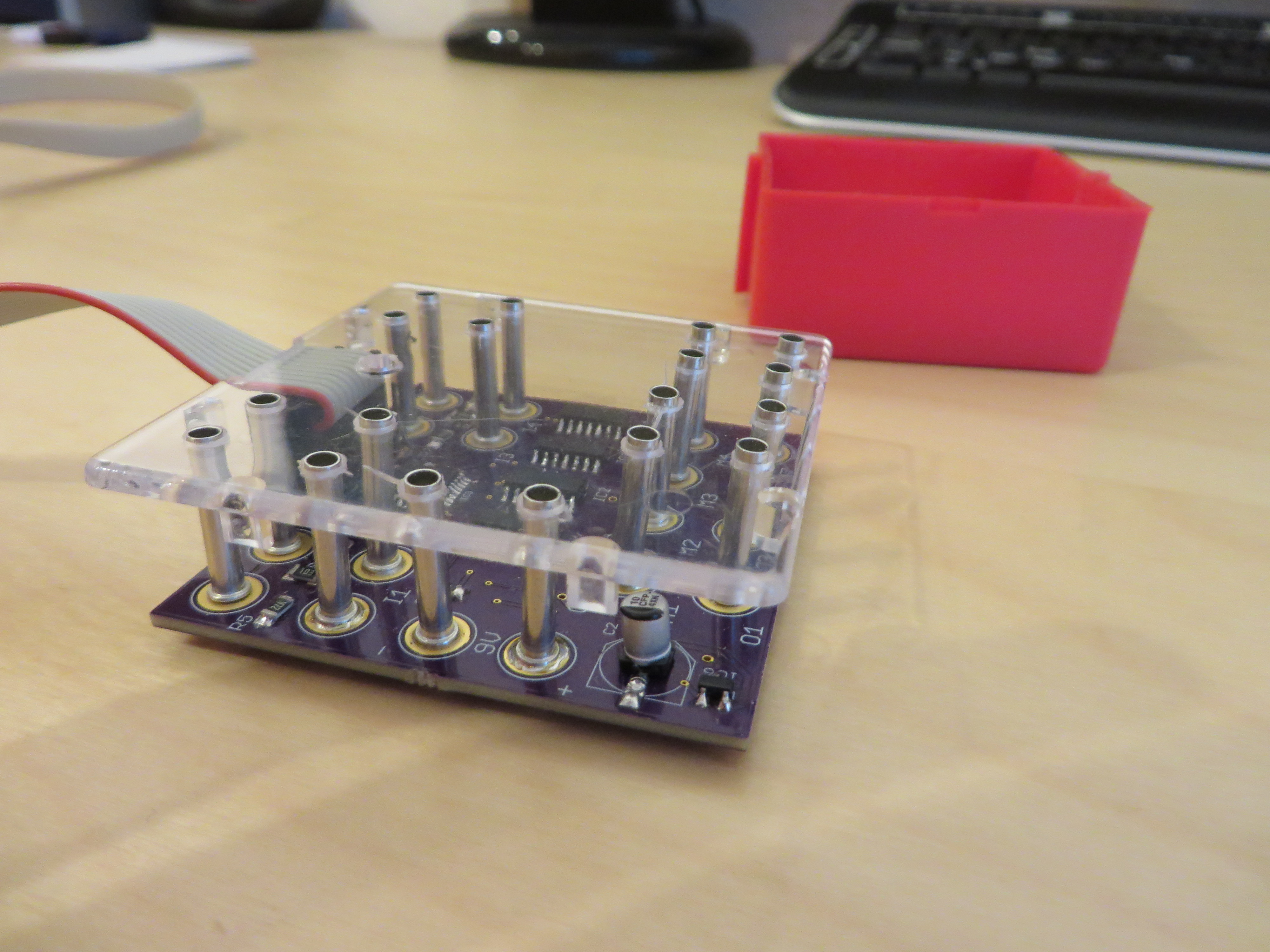 Trotz sorgfältigem Markieren ist es natürlich so gekommen, wie ich es befürchtet hatte: Die einzelnen Löcher (3,5mm) passten perfekt, aber ein paar waren 1-2mm an der falschen Stelle, so dass der Deckel nicht passte. Gewalt ist ja bekanntlich immer eine Lösung (zumindest bei solchen Problemen), und damit ging es dann auch. Ich bin mir jetzt nicht ganz sicher, ob ich die einzelnen Bundhülsen verbogen habe, oder ob ich sie in den Lötstelle bewegt habe, und ich bin mir auch relativ sicher, dass das alles nicht so toll für das Material ist, aber zumindest sitzt der Deckel jetzt sehr fest 😛
Trotz sorgfältigem Markieren ist es natürlich so gekommen, wie ich es befürchtet hatte: Die einzelnen Löcher (3,5mm) passten perfekt, aber ein paar waren 1-2mm an der falschen Stelle, so dass der Deckel nicht passte. Gewalt ist ja bekanntlich immer eine Lösung (zumindest bei solchen Problemen), und damit ging es dann auch. Ich bin mir jetzt nicht ganz sicher, ob ich die einzelnen Bundhülsen verbogen habe, oder ob ich sie in den Lötstelle bewegt habe, und ich bin mir auch relativ sicher, dass das alles nicht so toll für das Material ist, aber zumindest sitzt der Deckel jetzt sehr fest 😛
Da ich schon mal in der Werkstatt war, habe ich auch gleich die Fehler im Layout behoben in dem ich R14 entfernt habe und den Pin oben abgeschnitten und unten mit dem Pin daneben (GND) verlötet habe. Jetzt ist Slave Select dauerhaft auf Low, und es fließt weder ein Strom durch den Widerstand ab, noch wird der Bus beeinflusst.
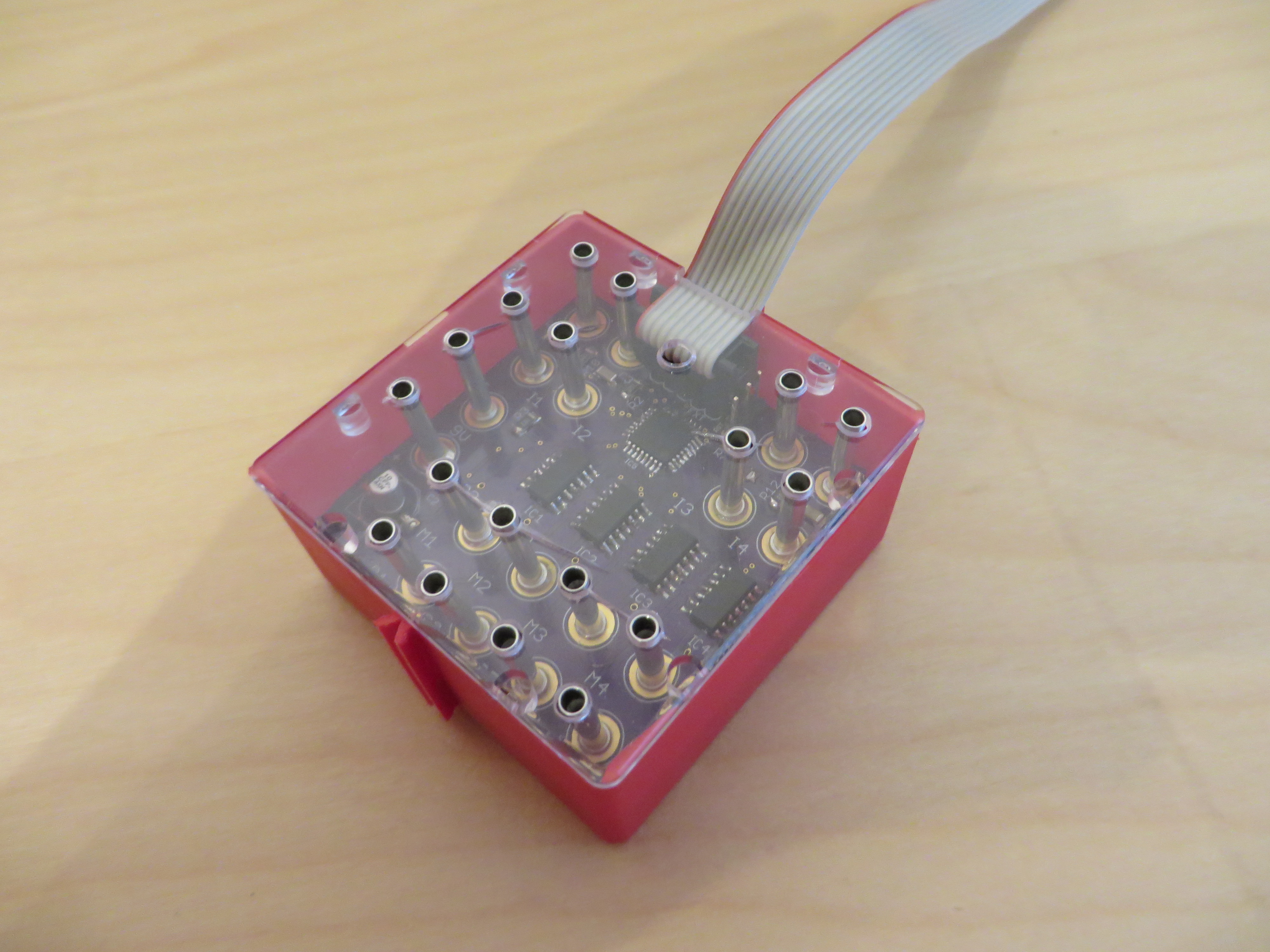
Schlussendlich habe ich dann noch das Kabel konfektioniert, das ist einfach ein Flachbandkabel. Irgendwie bin ich mit diesen Steckern überfordert, ich habe es schon wieder geschafft, den einen Stecker falsch anzubauen, so dass das Kabel jetzt verdreht ist, und zum Interface zeigt, statt davon weg. Naja, ist auch egal. Auf Seiten des ftRoboExt hatte ich leider nicht bedacht, dass so einer Stecker höher ist als die Bundhülsen, und daher mit Stecker der Deckel nicht mehr zu geht. Wenn man die Zugentlastung entfernt, geht es aber gerade so. Hier könnte man sich überlegen, bei einer neuen Revision das Kabel einfach zu verlöten, da man den Deckel eh nur schlecht abmachen kann, man also auch den Stecker nicht wirklich wechseln kann.
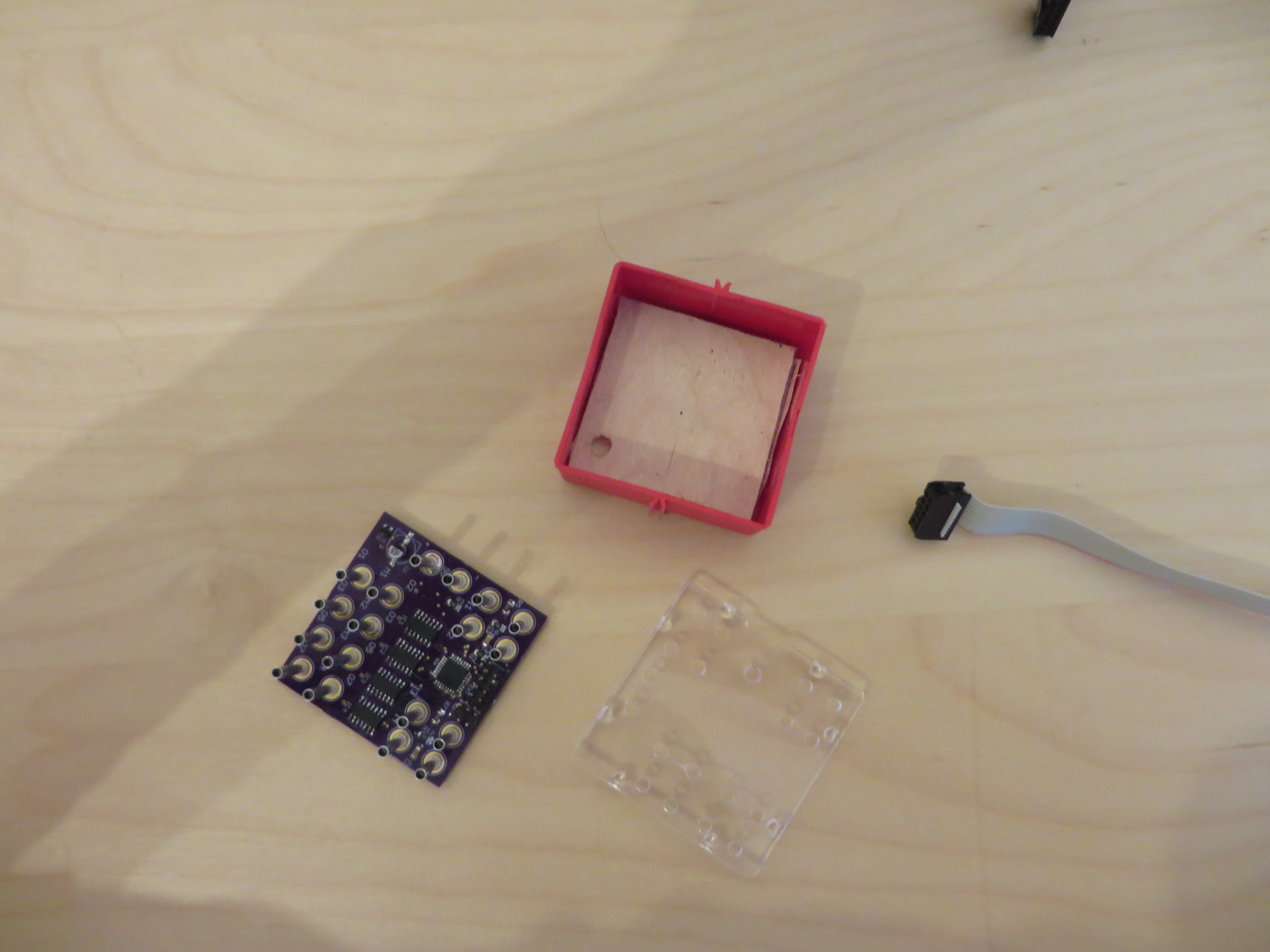
Schlussendlich musste dann noch ein Abstandshalter in die Kassette, damit die Bundhülsen auch genau bündig mit dem Deckeln abschließen, und nicht zu tief liegen. Hier hatte ich erst vor gehabt, eine Art Rahmen zu konstruieren, auf dem die Platine liegt, zufälligerweise hatten zwei Lagen Laubsägeholz aber genau die richtige Dicke. Ich musste nur ein kleines Loch die die obere Platte sägen, damit die Diode auf der Unterseite genug Platz hat. Das Holz ist einfach mit ein bisschen Holzleim grob in der Kassette befestigt.
 Und was soll ich sagen: Mir gefällt das ganze ziemlich gut!
Und was soll ich sagen: Mir gefällt das ganze ziemlich gut!
Ein paar Sachen stehen noch auf meiner Liste: Zum einen habe ich jetzt wieder eine Idee, wie ich doch noch ein paar Bytes persistent auf dem Modul speichern kann, um mir zu merken, wo welche Kisten in meinen Hochregallager sind, zum anderen habe ich festgestellt, dass meine Umsetzung der 8 Geschwindigkeitsstufen nicht besonders gut ist, insbesondere sollte 1 nicht 0% und 8 100% sein. Dazwischen liegen bei fischertechnik immer genau 10%, entsprechend angefangen bei 30%. Das ist vermutlich durchdacht, aktuell bewegen sich Motoren nämlich bei 1-3 gar nicht 😉
 Schlussendlich war ich heute auf der Maker Faire in Hannover, wo es auch einen Stand von der fischertechnik community gab, und dort habe ich mit einem gesprochen, der meinte, es könnte Interesse an dem Modul geben. Zwar ist das Robo Interface wohl schon aus den meisten Modellen verschwunden, aber es gibt für die aktuellen Controller gar keine Erweiterungen, dort kann man nur weitere Controller im Slave-Modus dranhängen, aber das geht natürlich sehr ins Geld. Vielleicht kann man mein Modul ja so umbauen, dass es auch an TX(T) läuft. Da muss ich mein Projekt man im dortigen Forum vorstellen.
Schlussendlich war ich heute auf der Maker Faire in Hannover, wo es auch einen Stand von der fischertechnik community gab, und dort habe ich mit einem gesprochen, der meinte, es könnte Interesse an dem Modul geben. Zwar ist das Robo Interface wohl schon aus den meisten Modellen verschwunden, aber es gibt für die aktuellen Controller gar keine Erweiterungen, dort kann man nur weitere Controller im Slave-Modus dranhängen, aber das geht natürlich sehr ins Geld. Vielleicht kann man mein Modul ja so umbauen, dass es auch an TX(T) läuft. Da muss ich mein Projekt man im dortigen Forum vorstellen.