
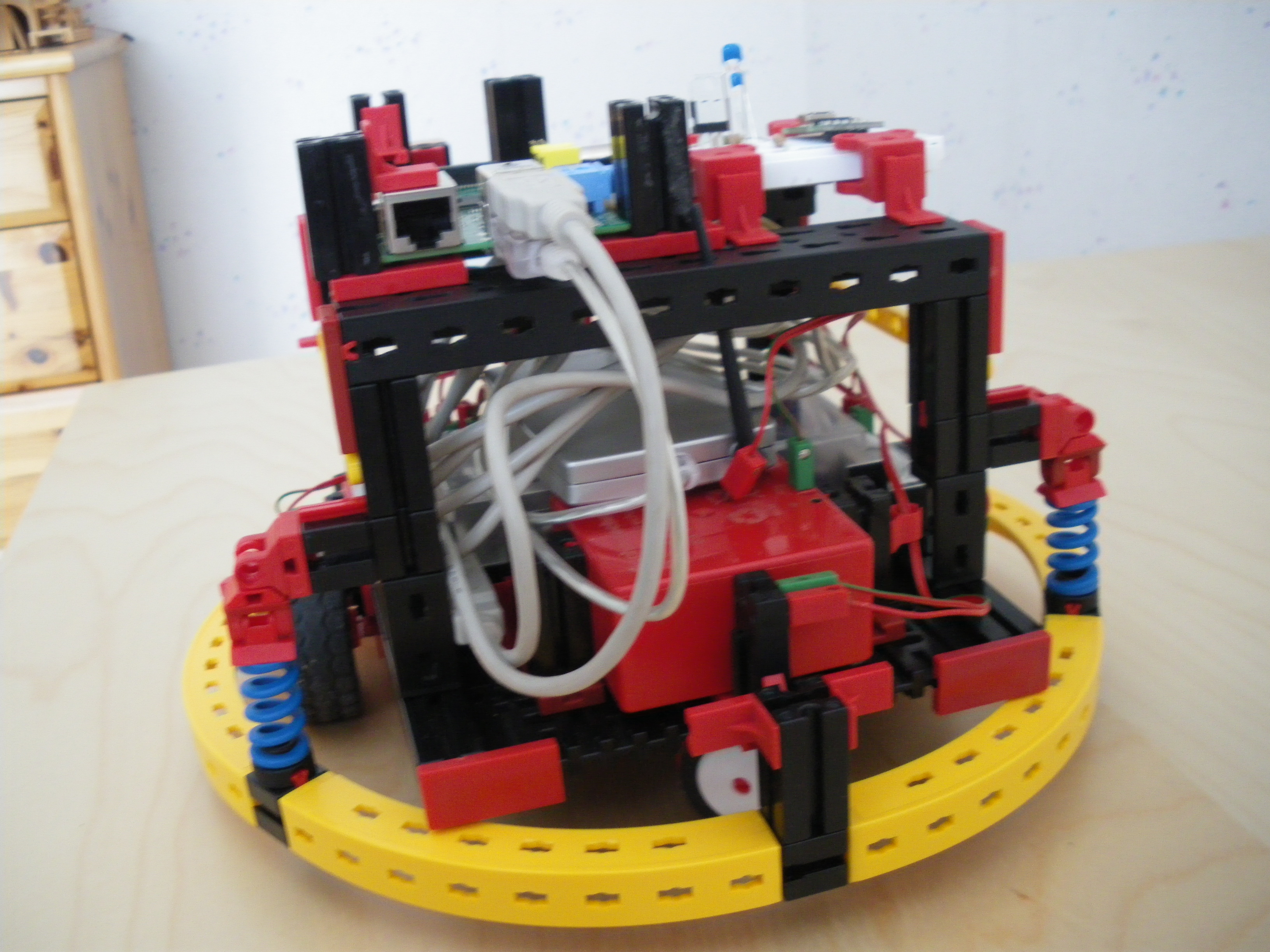
So, ich habe mal wieder Zeit gefunden an meinem Roboter zu arbeiten (Teil Eins lesen!), und ich habe im Grunde ganz neu angefangen. Natürlich soll es immer noch ein Roboter werden, der Kamera gesteuert einer Linie folgt, aber ich habe den kompletten Unterbau ausgetauscht. Er war ja mal ein NIBObee, jetzt besteht der komplette Unterbau aus fischertechnik:
 Warum? Ganz einfach, mir kam der ganze Unterbau einfach zu instabil vor. Jetzt ist das ganze deutlich belastbarer, und die Motoren sind auch kräftiger. Gerade weil ja auch noch eine Stromversorgung (also ein Akku) dazukommen sollte, und die ja nun mal recht schwer sind.
Warum? Ganz einfach, mir kam der ganze Unterbau einfach zu instabil vor. Jetzt ist das ganze deutlich belastbarer, und die Motoren sind auch kräftiger. Gerade weil ja auch noch eine Stromversorgung (also ein Akku) dazukommen sollte, und die ja nun mal recht schwer sind.
Der Aufbau stammt in großen Teilen aus der Anleitung des RoboMobile Set, nur der Aufbau mit Raspberry Pi und Breadboard ist neu. Der gelbe Rahmen ist mit Tastern ausgestattet, damit können schon wunderbar Hindernisse erkannt werden. Dazu gibt es noch Odometriesensoren an jedem Rad (leider nur mir 8 Impulsen pro Drehung, also ziemlich ungenau…)
Das RoboInterface hat eine USB-Schnittstelle, und diese ist direkt mit dem Raspberry Pi verbunden. Dort soll die libft zum Einsatz kommen, um das Interface zu steuern (über Python). Dazu hängt noch der WLAN-Adapter am USB, auch wenn ich da über einen neuen nachdenke, denn der hat ab und zu Aussetzer (wodurch die SSH Session abbricht) und ist auch nicht wirklich handlich…
Jedenfalls fährt der Roboter mit dem fischertechnik-Demo-Programm schon schön durch die Gegend aus weicht Hindernissen aus.
Ein kleines Problem bleibt die Stromversorgung: Das Interface lässt sich über einen fischertechnik-Akku problemlos versorgen (auch wenn der nur 900mAh hat), und der passt auch ganz wunderbar in das Chassis:
 Doch der Raspberry Pi braucht ja nun mal 5V und kann mit den 9V aus dem Akku nichts anfangen. Dort kommt das Breadboard ins Spiel: Dort sitzt ein 77ct Spannungsregel von Conrad, ein L78S50CV wenn ich das richtig lesen kann, der aus den 9V wieder stabile 5V machen sollte. Laut meinem Multimeter klappt das auch recht gut (direkt am Raspberry Pi gemessen), aber der Spannungregulator wurde dabei extrem heiß (ich hab mich direkt verbrannt), daher scheint da noch was nicht zu stimmen (obwohl das leider so vorgesehen ist, theoretisch soll der bis zu 150°C aushalten 🙁 )
Doch der Raspberry Pi braucht ja nun mal 5V und kann mit den 9V aus dem Akku nichts anfangen. Dort kommt das Breadboard ins Spiel: Dort sitzt ein 77ct Spannungsregel von Conrad, ein L78S50CV wenn ich das richtig lesen kann, der aus den 9V wieder stabile 5V machen sollte. Laut meinem Multimeter klappt das auch recht gut (direkt am Raspberry Pi gemessen), aber der Spannungregulator wurde dabei extrem heiß (ich hab mich direkt verbrannt), daher scheint da noch was nicht zu stimmen (obwohl das leider so vorgesehen ist, theoretisch soll der bis zu 150°C aushalten 🙁 )
Das neue Chassis sieht jedenfalls richtig gut aus, und ist deutlich besser als das alte. Natürlich muss ich jetzt ein bisschen Code umschreiben, und hoffen, dass die libft überhaupt funktioniert. Und natürlich den Spannungwandler besser kühlen 🙁
So zum Abschluss noch ein paar Bilder, dann baue ich weiter.



„If adequate heat sinking is provided, they can deliver over 2A output current.“
Wenn du also keinen Kühlkörper dran hast, dann ist das Glühen kein Wunder, denn der RPI zieht ja alleine schon manchmal 1,5A. Wenn dann noch der Wlan-Adapter dazu kommt, dann dürfte das auch schnell mal bei 3 oder mehr landen. Wenn du das nicht sowieso schon gemacht hast, dann verwende mal ein unverschlüsseltes WLAN. Mein RPI braucht dann gleich deutlich weniger Strom. Weitere Einsparmöglichkeit: Heruntertakten und Grafik einschränken (über die config.txt). Ansonsten gibt es ja inzwischen auch einen RPI ohne Ethernet mit weniger Verbrauch… (allerdings auch nur 1x USB).
Christoph
Ja, noch ist kein Kühlkörper dran… War mein erster Kontakt mit einem Spannungswandler 🙂 Wenn ich wieder Zeit habe, werde ich mal sehen, ob sich da was machen lässt. (Den Part hab ich Datenblatt wohl überlesen…)
Die anderen Sachen sind auch eine gute Idee, ich benutzte tatsächlich mein normales WLAN, und das ist natürlich verschlüsselt. Allerdings konnte ich meine Pi bis jetzt mit allem Zubehör aus einem 1,2 A Netzteil speisen, 3 A kommt mir da jetzt etwas zu hoch vor… Ich werde auf jeden Fall mal ein paar Verbrauchsmessingen anstellen!
Du scheint ja auch einen mobilen Einsatz im Auge zu haben, wenn du da schon Erfahrung mit hast. Darf man Näheres erfahren? 🙂
Ich hatte den RPI mal ausprobiert um meine Kamera über den USB-Anschluss und mit gphoto2 per Webbrowser (auf dem Handy) fernzubedienen, um keine Erschütterungen bei HDR-Aufnahmen mit dem Auslöser zu produzieren. Dabei war der RPI ein WLAN-AP (ohne Verschlüsselung) und hing an einem USB-Akkupack (wie man sie als „Not-Akku für dein Handy“ erwerben kann). So richtig gebraucht habe ich das dann aber doch nicht und benutze den RPI mittlerweile als Mediacenter mit XBMC.
Außerdem habe ich ihn zwischendurch mal für wen anders als Rückfahrkamera für das Auto benutzt. Auch dabei war er als WLAN-AP im Einsatz und hat das Bild einer USB-Webcam auf ein Tablet gestreamt. Das war aber auch nicht so super, weil die USB-Webcam nach einiger Zeit immer nicht mehr ging und abgezogen werden musste. Das lag wohl am V4l2-Treiber, der irgendwie etwas buggy zu sein schien (möglicherweise lag das auch daran, dass er nicht genau für diese Kamera gebaut wurde).
Christoph